goGPS 1.0 OPEN Edition
A MATLAB software for the processing of static GNSS receivers
goGPS is a software created for processing GNSS raw data. It was originally written specifically to work with GPS single-frequency low-cost receivers but now it can fully exploit multi-constellation, multi-frequency, multi-tracking observations. goGPS implements multiple algorithms to analyze the data, and at the moment these include two main Least Squares (LS) engines: one working on combination of observables (e.g. iono-free observations) and one able to use all the frequencies and trackings logged without performing any combinations (ionospheric delay are parameters of the normal equations). The combined and uncombined engines can both compute Precise Point Positioning (PPP) solutions and Network adjustments (NET).
Note: At the moment the software is focused on the processing of permanent stations (geodetic or low-cost) but it does not yet include the possibility to analyze moving receivers.
A bit of history
a not very useful tale by Andrea Gatti
Disclaimer: I'm writing the story as I remember it, I joined the development later and so I may skip many important points but I hope someone will correct and/or expand my narration in the future (this is a wiki).
It was the year 2007 at Politecnico di Milano - Como campus, in the beginning, there was a set of routines used to teach the students GPS data processing and Kalman filtering. At that time Mirko Reguzzoni and Eugenio Realini started to believe that there could have been space for a new GPS processing software based on MATLAB language. With the help of some students (the founding fathers), they started working on the creation of a complete software exploiting the Kalman filter approach (KF). The first release of goGPS dates back to 2009 when the code was released under GPL and uploaded on the SourceForge platform. The software was used at the university and started to receive contributions from different parts of the World. In the meantime, Eugenio after defending his Ph.D. thesis on goGPS moved to Japan for a post-doc focused on tropospheric studies, there he wrote most of the code necessary for computing PPP solutions. In 2014 Eugenio came back to Italy to join some of his ex-colleagues at Politecnico in a spin-off called GReD and released a first-version able to perform precise point positioning with a Kalman Filter approach.
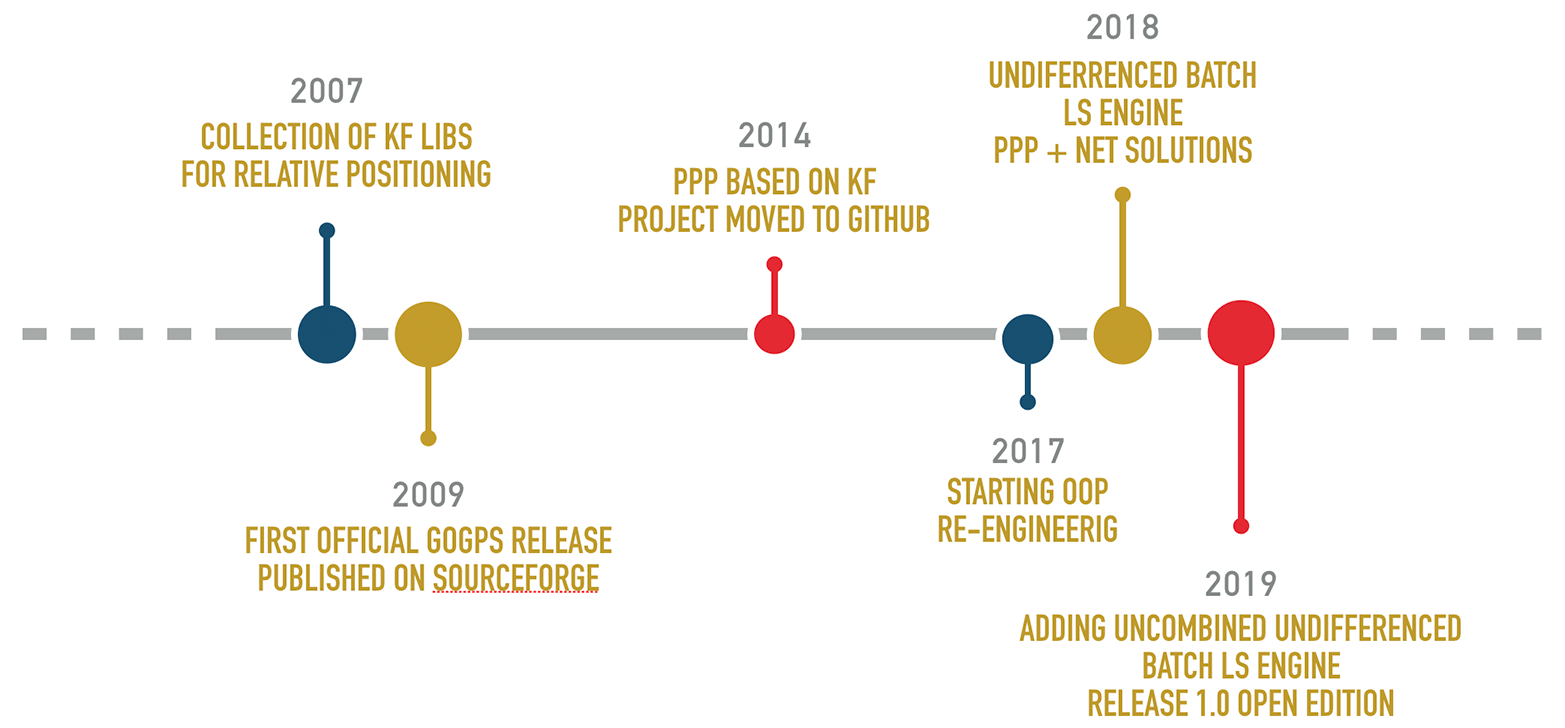
When I started working on goGPS at the end of 2016, the software used a fixed data structure that limited the usage of a maximum of two frequencies and was not ready for the modern constellations. It was very complicated to expand it or modify the processing sequence; what started as a performance improvement soon became a total rewrite of the software. I decided to use object-oriented programming for greater flexibility and modularity but the Kalman filter approach was still a limiting performance factor (MATLAB is notoriously slower in performing iterative processing). Eugenio made some preliminary tests on a batch least-square (LS) engine using differenced and combined observations that were very promising, so when Giulio Tagliaferro joined the team of GReD and we had to develop a new engine he proposed and wrote a first undifferenced batch processor that is still the core behind goGPS pre-processing. MATLAB excels in working with matrixes and the new engine is much faster than the old one with KF, but we were always working with post-processing of quasi-static (permanent) stations, and we optimized the processing for them, now we no longer support moving receivers. In 2018 I left Politecnico and joined GReD; since then 99% of the current development is supported by our spin-off. In the last year, Giulio and I took care of most of the development, improving the software that now has very few lines of code in common with the original version. The last release with KF is 0.5.x and can be found now in the legacy branch. The new 1.0 release (expected for the beginning of 2020) is a completely new software with two engines (combined and uncombined) able to perform PPP and Network adjustments that can be easily expanded to support other approaches and be the base for testing new ideas.
About
List of the contributors of the original goGPS
Developers of the original core:
- Mirko Reguzzoni
- Eugenio Realini
Founding fathers:
- Alessio Dominioni
- Roberto Terruzzi
- Marco Colla
- Marcello Palmulli
- Michele Tettamanti
Contributors (in temporal order):
- Sara Lucca
- Lisa Pertusini
- Daniele Sampietro
- Luana Valentini
- Alemu Befkadu Nigussie
- Ivan Reguzzoni
- Stefano Caldera
- Damiano Triglione
- Giuliano Sirioni
- Antonio Herrera Olmo
- Andrea Gatti
- Hendy F. Suhandri
- Andrea Nardo
- Daisuke Yoshida
- Marco Negretti
- Yuya Iwaki
- Louis Osei-Poku
- Paiyuan Zhou
List of the contributors of the new goGPS 1.0
Developers of the new goGPS core:
- Andrea Gatti
- Giulio Tagliaferro
Other Contributors:
- Eugenio Realini
- Stefano Caldera
- Lisa Pertusini
- Andreas Krietemeyer
- Alice Bonfiglio
- Stefano Barindelli
- Alessandra Mascitelli